|
|
 |


|
|
Surrogate IV
The Surrogate IV™ is the latest generation of anthrobots. This generation replicates human shoulder, spine, and wrist architecture using commercial-off-the-shelf (COTS) parts for a new level of sophistication. Patent pending.
 more information more information
|
|
|
Super Seeker II
The Super Seeker II™ provides a higher level of speed and precision over prior art. COTS components replace expensive custom parts. Unique patent pending design is the new state-of-the-art. Eliminates key-hole, Zenith problem. Singularity-free pitch/yaw kinematics.
more information |

|
|
Omni-Wrist VII
The Omni-Wrist VII™ offers a new level of dexterity and precision. Cables are replaced with rotating shafts for a higher level of sterility.
Singularity-free, it is the most dexterous surgical wrist designed.
more information |

|
|
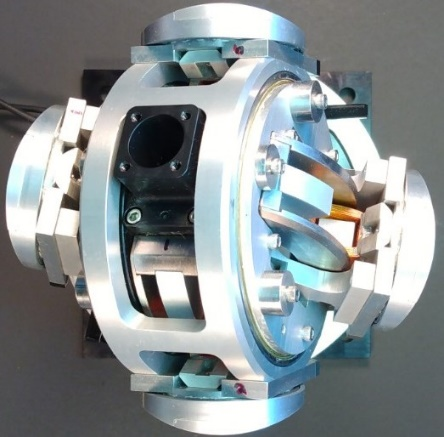
Omni-Wrist VI
The Omni-Wrist VI™ gimbal offers a new level of ruggedness and precision. Featuring four heavy-duty linkages and tapered roller bearings. U.S. and Foreign Patents Pending.
Featuring four unique linkages repeated and simple bearings. U.S. and Foreign Patents Pending.
more information |

|
|
Omni-Wrist V
The Omni-Wrist V™ gimbal offers advancements in reduced cost and complexity.
Featuring three unique linkages repeated and simple bearings. U.S. and Foreign Patents Pending.
more information |

|
|
Super Seeker
The Super Seeker, a patent-pending gimbal design, offers a self-contained design lower in cost than current gimbal designs and weighing significantly less than traditional gimbal systems, while enabling a doubling of the sensor's surface area.
more information |

|
|
Robotic Surrogate III
Human-like dexterity and range of motion of the Robotic Surrogate III
The S3 demonstrates the new high-dexterity shoulder and third generation Onmi-Hand III. All of the axis are powered by electric linear actuators for efficiency and ease of maintenance.
more information |

|
|
Omni-Wrist III
Strength and precision of the Omni-Wrist III™
Feartures include:
Singularity-free motion
Elimination of all gearing found in previous designs Singularity-free motion Zero backlash for improved positional accuracy 1" through-hole for wiring, fiber optics, hoses, etc. Light-weight aircraft type design Simple preloaded bearing design Only three unique components
more information |

|
|
Omni-Wrist III Platform
Wide range of motion with the Omni-Wrist III™ Platform
The Omni-Wrist III� Platform is designed for the new generation of virtual reality rides, and also has applications for manipulating any large, heavy or bulky object for testing or simulation. With more range of motion than conventional Stewart Platforms, the Omni-Wrist III� Platform features electric servo drives, +-35 degrees pitch/yaw, high slew rates and more.
more information |

|
|
Omni-Wrist
Strength and precision of the Omni-Wrist™
The Omni-Wrist produces an unmatched level of precise movement while providing a full 180 degrees of motion. The original Omni-Wrist design was the first mechanical wrist to solve the problem of singularity.
more information |

|
|
Omni-Hand
Versatility of the Omni-Hand
The Omni-Hand's unsurpassed human-like flexiblity enables it to hold and manipulate a range of tools. In addition to fully articulate fingers, this versatile hand possesses a folding palm, which makes possible a human-like, opposable thumb.
more information |

|
|
Robotic Surrogate II
Human-like dexterity and range of motion of the Robotic Surrogate II, an advanced design that provides the full range of motion associated with the upper torso of the human body.
more information |

|
|
Minnac(tm) Electric Miniature Linear Actuator
Simple motion technology of the Minnac™
Compact yet rugged, this design features the simplicity of servo-electric controls in a flexible mechanical package. The clean electric design is available in power ranges of up to 600 pounds. Zero-backlash, sealed, and other options are available.
more information |
 Return to Top Return to Top
|